打开终端,输入
cd /usr/local/share/rcssserver3d/rsg/agent/nao/
sudo gedit naoneckhead.rsg
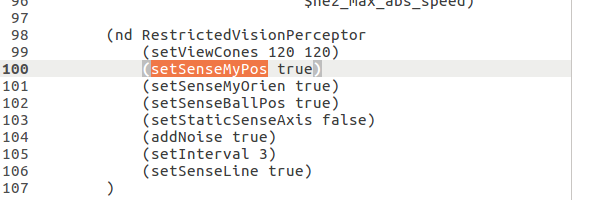
这时会打开一个文档,ctrl+f查找并修改setSenseMyPos,setSenseMyOrien,setSenseBallPos三个变量,全部修改为true.如图:
保存后关闭gedit。
然后继续在终端输入:
cd ~
cd .simspark/
sudo gedit spark.rb
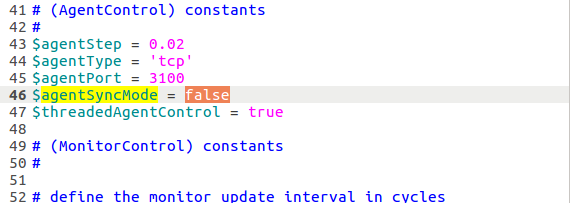
然后在打开的文件里面查找agentSyncMode,设为true。
保存并关闭。
然后继续在终端输入:
cd /usr/local/share/rcssserver3d/
sudo gedit rcssserver3d.rb
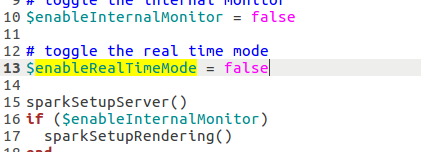
然后在打开的文件里面查找enableRealTimeMode,设为false。
保存并关闭。
然后继续在终端输入:
cd /usr/local/share/rcssserver3d/
sudo gedit naosoccersim.rb
然后在打开的文件里面查找BeamNoiseXY和BeamNoiseAngle,设为0.

- 本文链接: http://hjwblog.com/archives/robocup-优化前修改
- 版权声明: 本博客所有文章除特别声明外,均采用CC BY-NC-SA 3.0 许可协议。转载请注明出处!